Program Updates
NEW COURSE! Unitree Go1 Low-Level Motor Control
January 10, 2024 — 3 minutes
Unlock the full capabilities of your Unitree Go1 Quadruped. Gabe hands you the keys to control at the joint level.
DroneBlocks is excited to be joined once again by guest curriculum specialist Gabriel Margolis in this all new Course that explores Motor Control in the Unitree Go1. Gabe is a Graduate Researcher at the MIT Robotics lab, who specializes in quadruped robotics and is not only a subject matter expert but a pioneer in the space. Gabe previously created DroneBlocks’ Unitree Go1 Computer Vision Course, which we highly recommend checking out as a stand-alone course and also as a prerequisite for this Motor Control course as it shares similar useful Python coding protocols and techniques.
When it comes to the Unitree Go1 curriculum and resources, much of the feedback received from DroneBlocks customers and educators hints that students tend to enjoy charting their pathways of exploration – all they need is a little push. One educator framed it in the form of food – asking for as many “appetizer” lessons as possible, in order to let the students decide which direction they want to delve into for the rest of the semester. Dealing with a robot that has so many possibilities, the students’ imaginations sometimes best what DroneBlocks could ever dream up. In the case of motor control, DroneBlocks now delivers to students the ability to program the very kernel of quadruped locomotion down to each joint and motor…truly giving student programmers the keys to complete customization of movement. After this course, students can direct their quadruped to move wherever and however they desire.
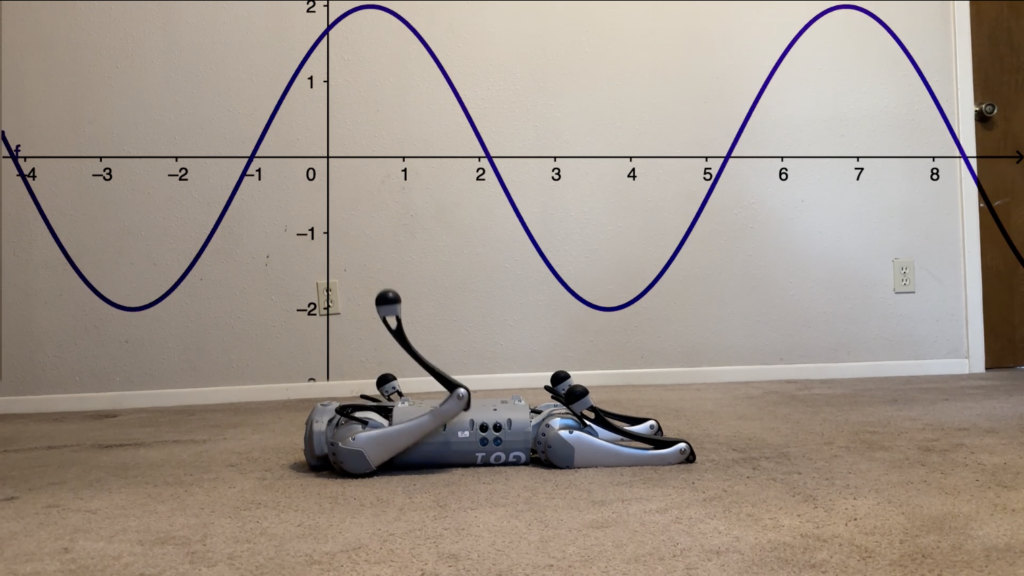
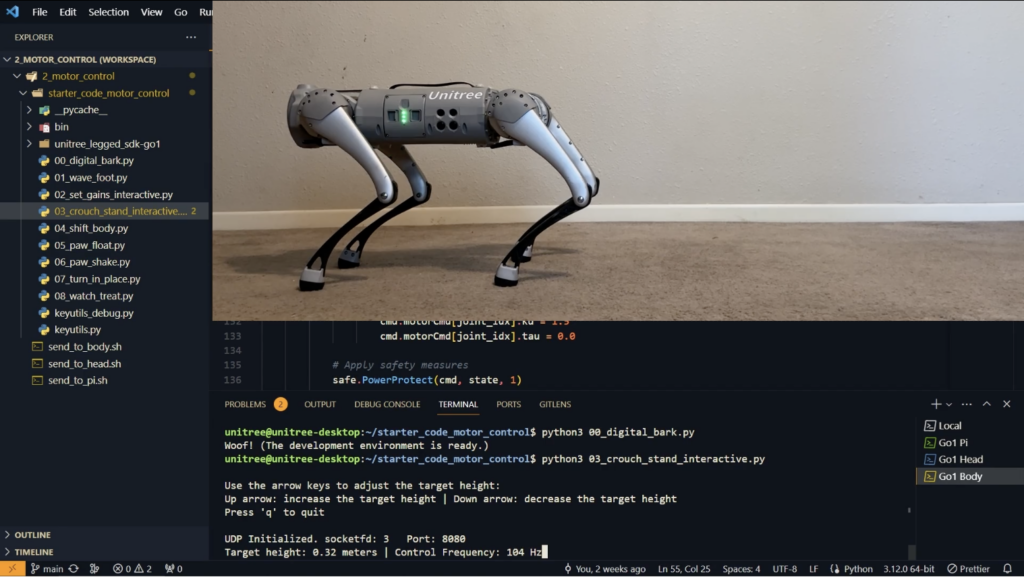
“What makes quadrupeds uniquely cool is that they have all these motors and freedom,” Gabe explained as the inspiration behind the subject matter. The Unitree Go1 has 12 joints, 3 in each leg, which allows for flexibility and fun. This course covers Unitree Unitree Go1’s both low-level and high-level API, sometimes using them in tandem to achieve unique results. Gabe explains “Low-level control is controlling each individual motor and exploring first, what does it mean to control them, what kind of information do they need to work and how can we write code to perform tasks that illustrate foundational quadruped locomotion.” The course is sprinkled with math such as geometry and trigonometry as Gabe explores and instructs moving a leg in a pattern, the concept of static stability, the importance of motor gains “AKA how a joint can be compliant versus stiff and situations when each is applicable.” After several low-level exercises, the final test is initiating a robot handshake. The second part of the course switches to high-level commands, which goes to Unitree’s built-in controller functions such as walking at different velocities and turns and customizing those controls. The final exercise is commanding the Unitree Go1 to follow and find a “treat.”
The course requires a good understanding of Python and comes with a downloadable package built by Gabe, along with a few protocol-related lessons that include creating a workspace and a few safety items. Gabe mentions that the first lesson is very in-depth, a 20-minute lesson, but the code writing gets a lot quicker after “training the intuition” and that students will take off soon after.
DroneBlocks is super excited to see where students take the Unitree Go1 after learning to unlock the full capabilities of the robot…and who knows, they may be one step closer to fielding their very own robot soccer team.
-
DroneBlocks Enterprise Membership | All-In-One Drone Curriculum License
Price range: $695.00 through $1,190.00 -

Go2 EDU+ Quadruped
Price range: $15,650.00 through $30,150.00
Shop More Products
From classroom-friendly kits to hands-on tools: Explore our hardware, packages, and accessories tailored for the educational journey.